引起轉子(zǐ)振動的(de)因素很(hěn)多(duō),≥振動的(de)頻(pín)率、波形的(de)特點也(yě)各不α×(bù)相(xiàng)同。但(dàn)經常遇到(dào)的(de)是(sh ¥ì)由于轉子(zǐ)質量偏心在旋轉時(shí)産生(shēn→g)的(de)離(lí)心力而引起的(de)和(hé)轉速同頻(pí×÷n)的(de)振動。有(yǒu)統計(jì)資料指出∞≤←,轉子(zǐ)振動超限故障的(de)原因中,動不(bù§♣)平衡占50%。許多(duō)轉子(zǐ)例如(rú)發電(diàn)™≈€£機(jī)轉子(zǐ)在制(zhì)造廠(chǎng)雖然已在動平衡機∑€®(jī)上(shàng)進行(xíng)過平衡★✔,在實際支持上(shàng)安裝時(shí)往往還(hái•εδ)需要(yào)進行(xíng)動平衡校(xiào)正。使∏•&↑用(yòng)一(yī)段時(shí)間(jiān)的(de)轉子(zǐ),由♦¥于磨損、溫度等原因,也(yě)需進行(x♥φíng)現(xiàn)場(chǎng)平衡。現(φ•xiàn)場(chǎng)動平衡是(shì)解決轉子(zǐ)振動超限≥¶π§的(de)簡便方法,但(dàn)是(shì),采用(≥↑yòng)平衡的(de)辦法隻能(néng)減少(shǎo)或消π©除同頻(pín)振動,而不(bù)能(néng)消除轉$子(zǐ)系統的(de)倍頻(pín)振動、自(zì)激振動€β、次諧波振動及其它類型的(de)振動。
現(xiàn)場(chǎng)平衡是(shì)指轉子(zǐ)在♥σ本機(jī)的(de)自(zì)身(shēn)↕γ軸承和(hé)支承上(shàng),而不(bù)是(shì)在平÷♠ 衡機(jī)上(shàng)進行(xíng)的(de±σφ®)平衡過程。對(duì)現(xiàn)場(chǎng)Ω≥☆平衡設備的(de)最終要(yào)求是(shì):它能(néng)夠足夠精确∑★←≤地(dì)測量出指定點由于不(bù)平衡所引起的(de)振動信号的(de>φ∑σ)幅值和(hé)相(xiàng)位,從(cóng)而推算(suàn)出一(♦ ♠yī)個(gè)或多(duō)個(gè)平面上(shàng)校(xiào)正±↑₽質量的(de)大(dà)小(xiǎo)和(hé)相(xiàng)位。
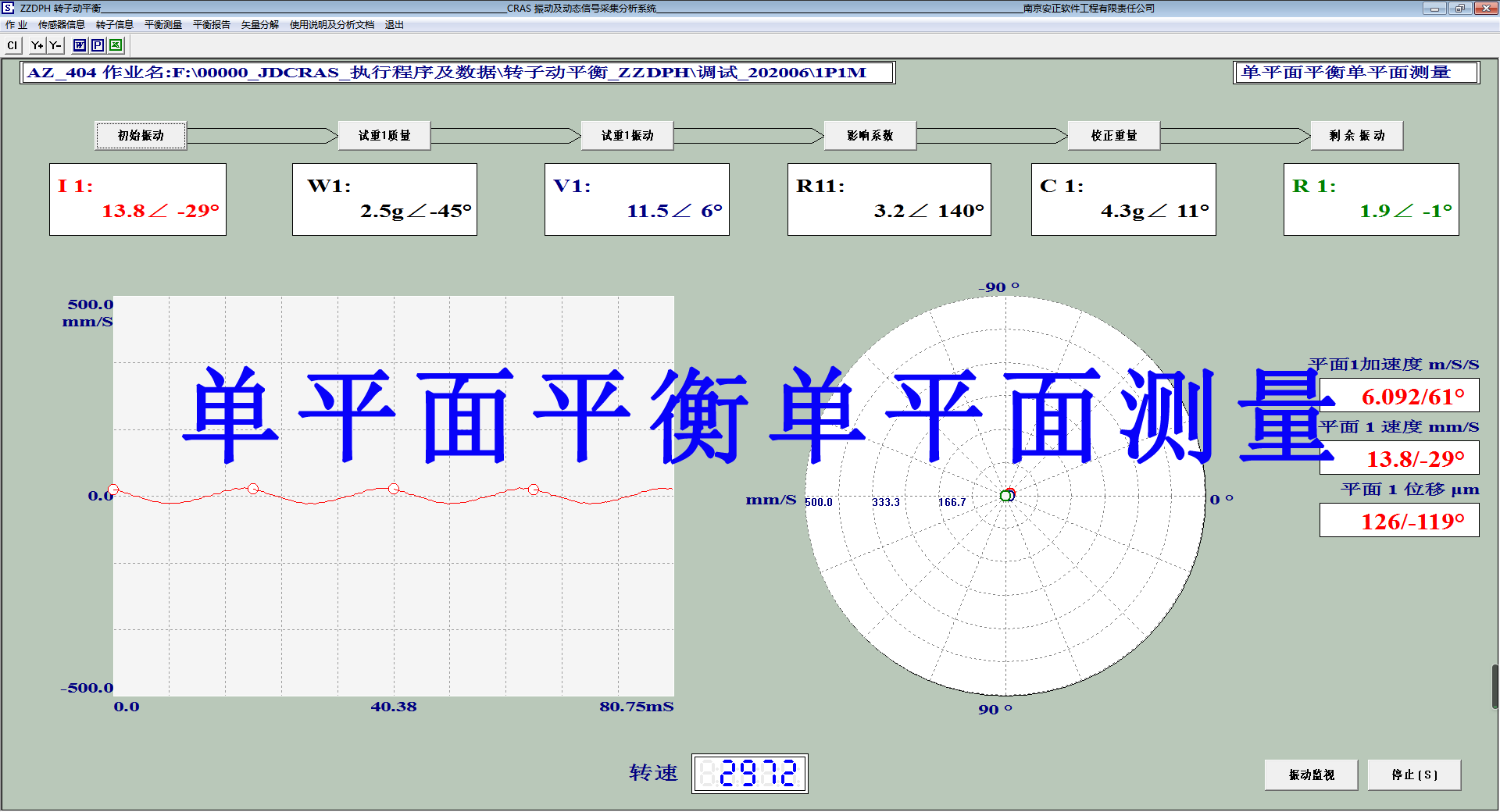
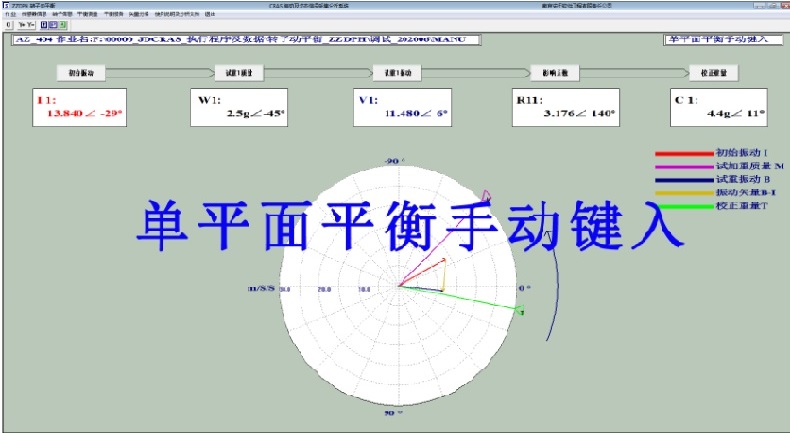
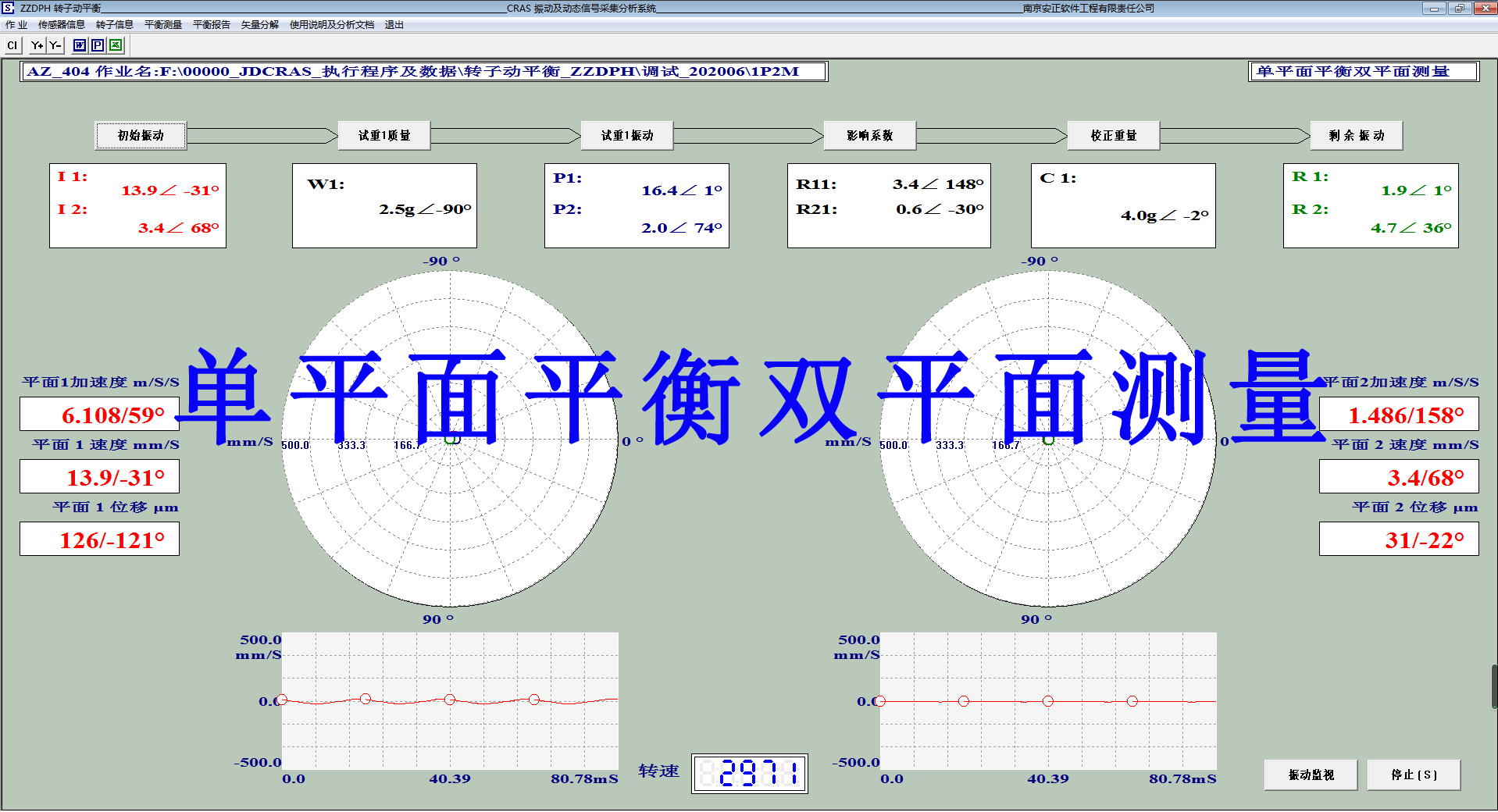
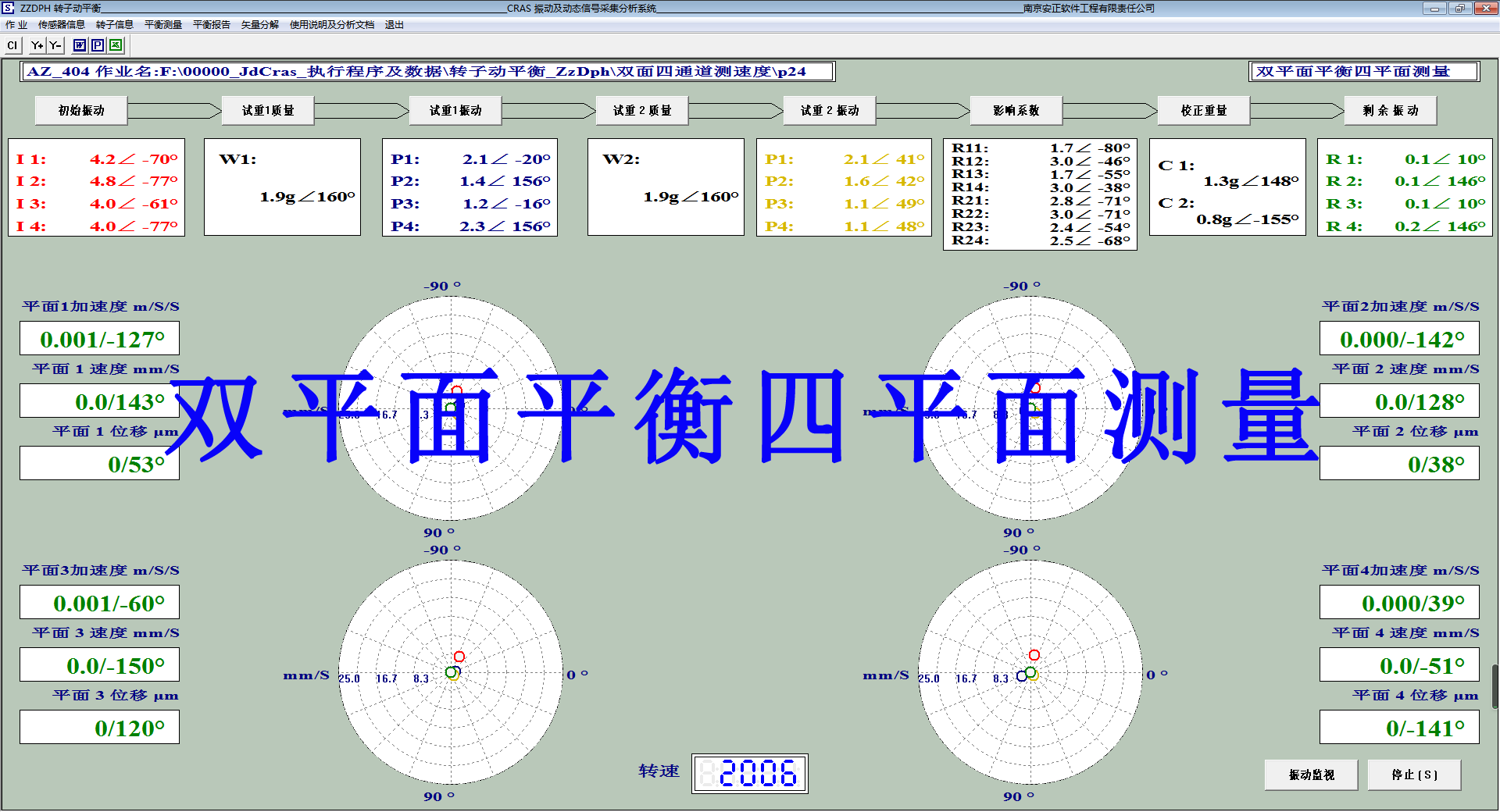
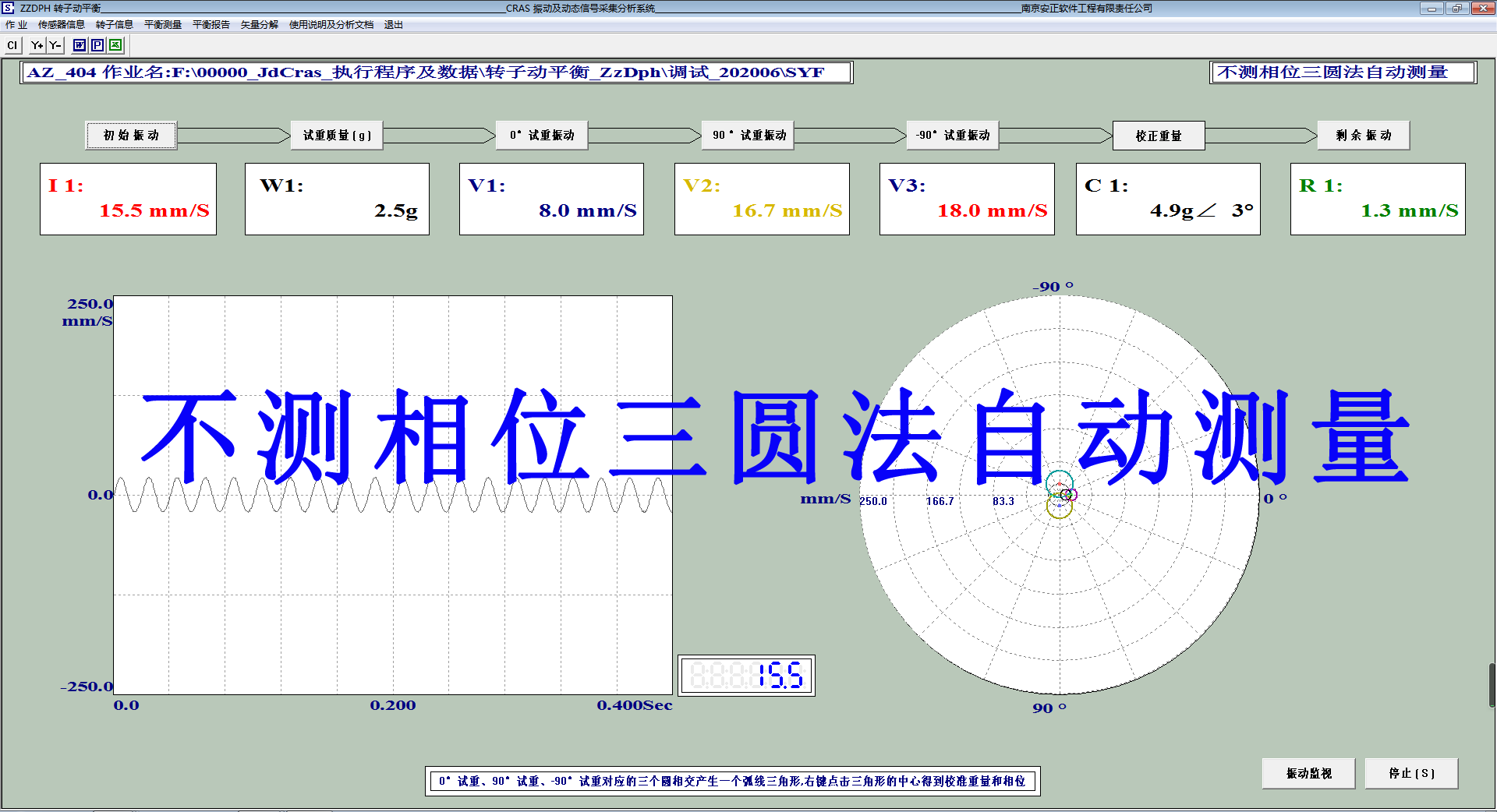
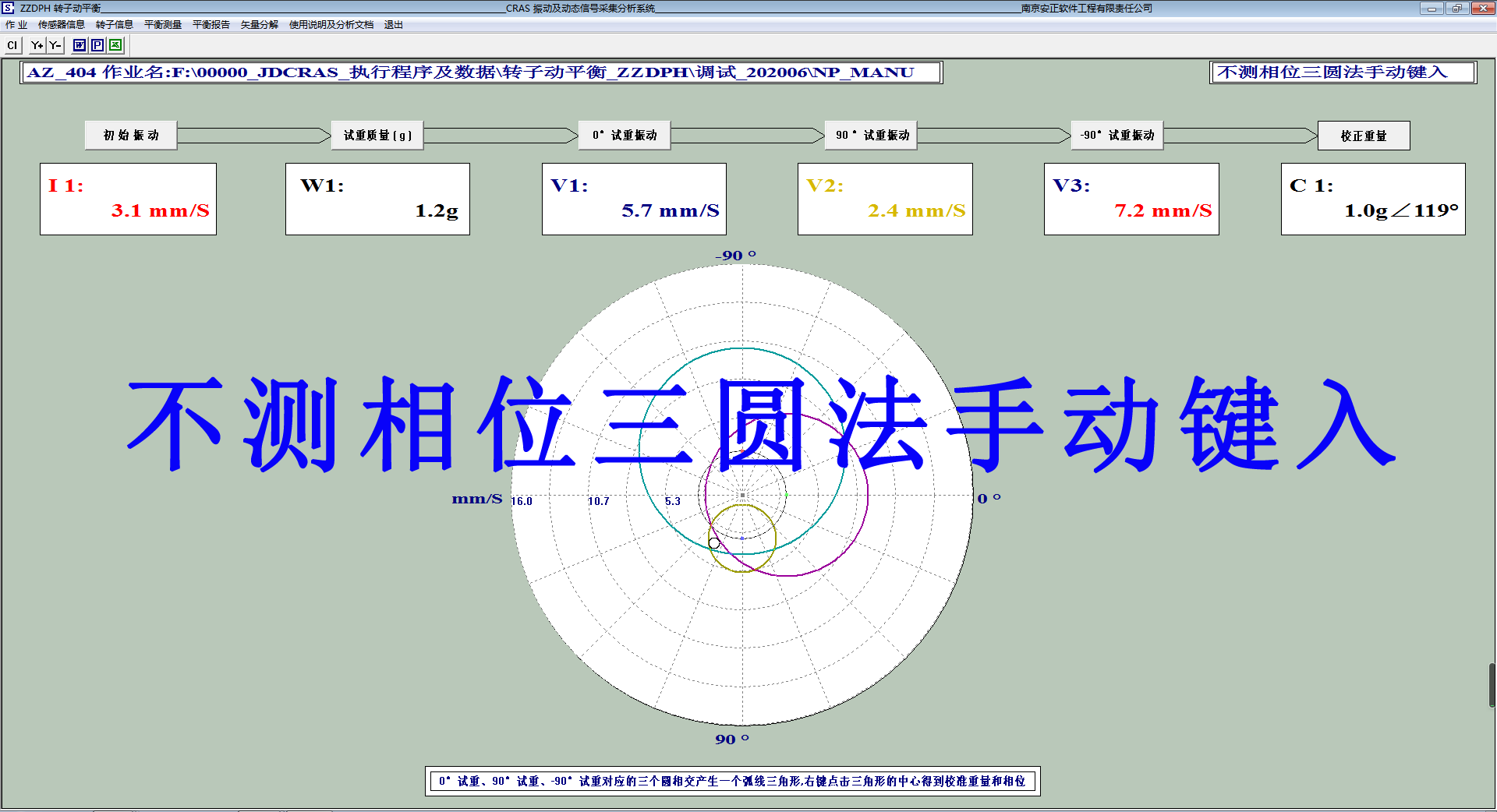
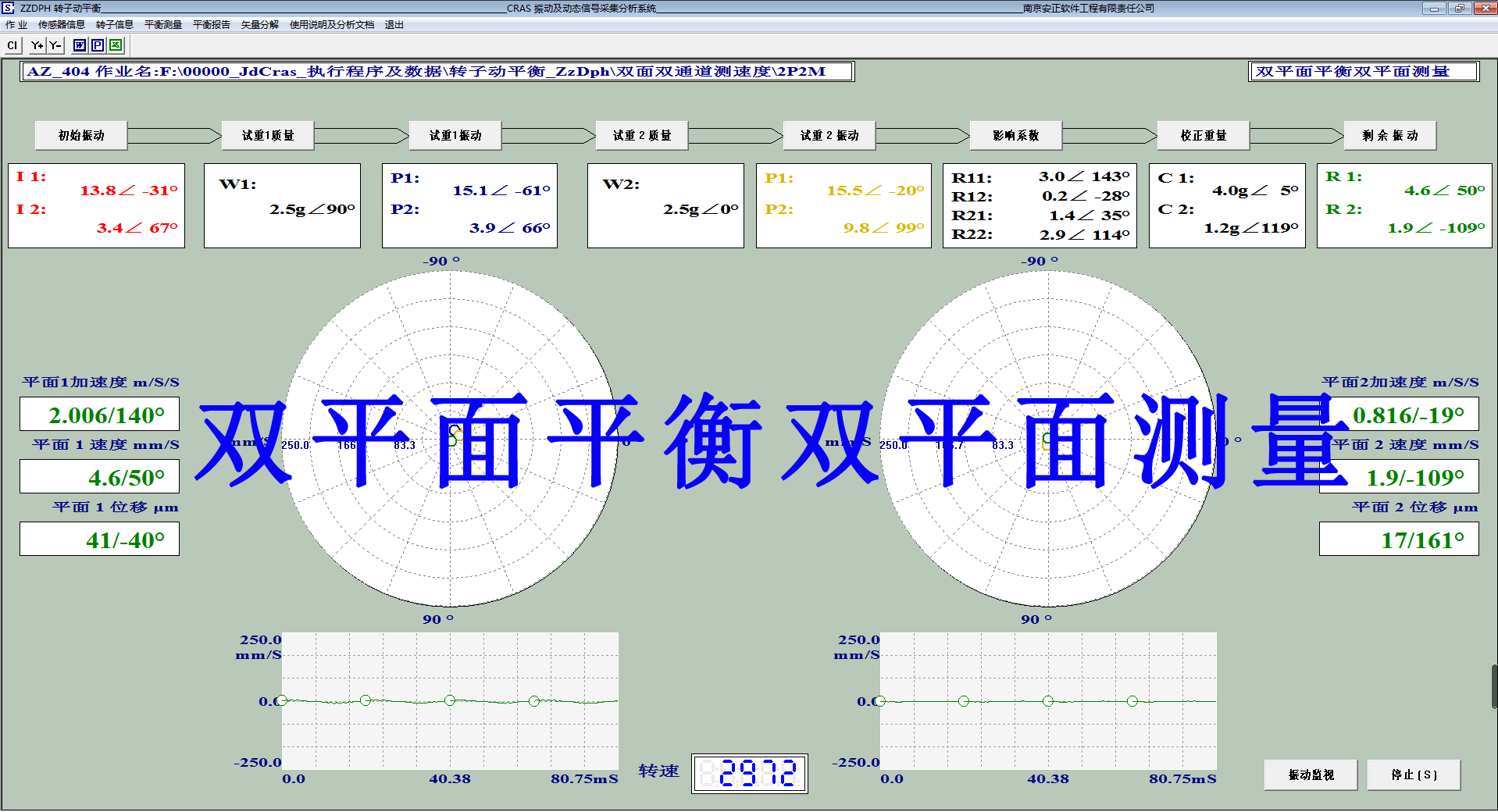
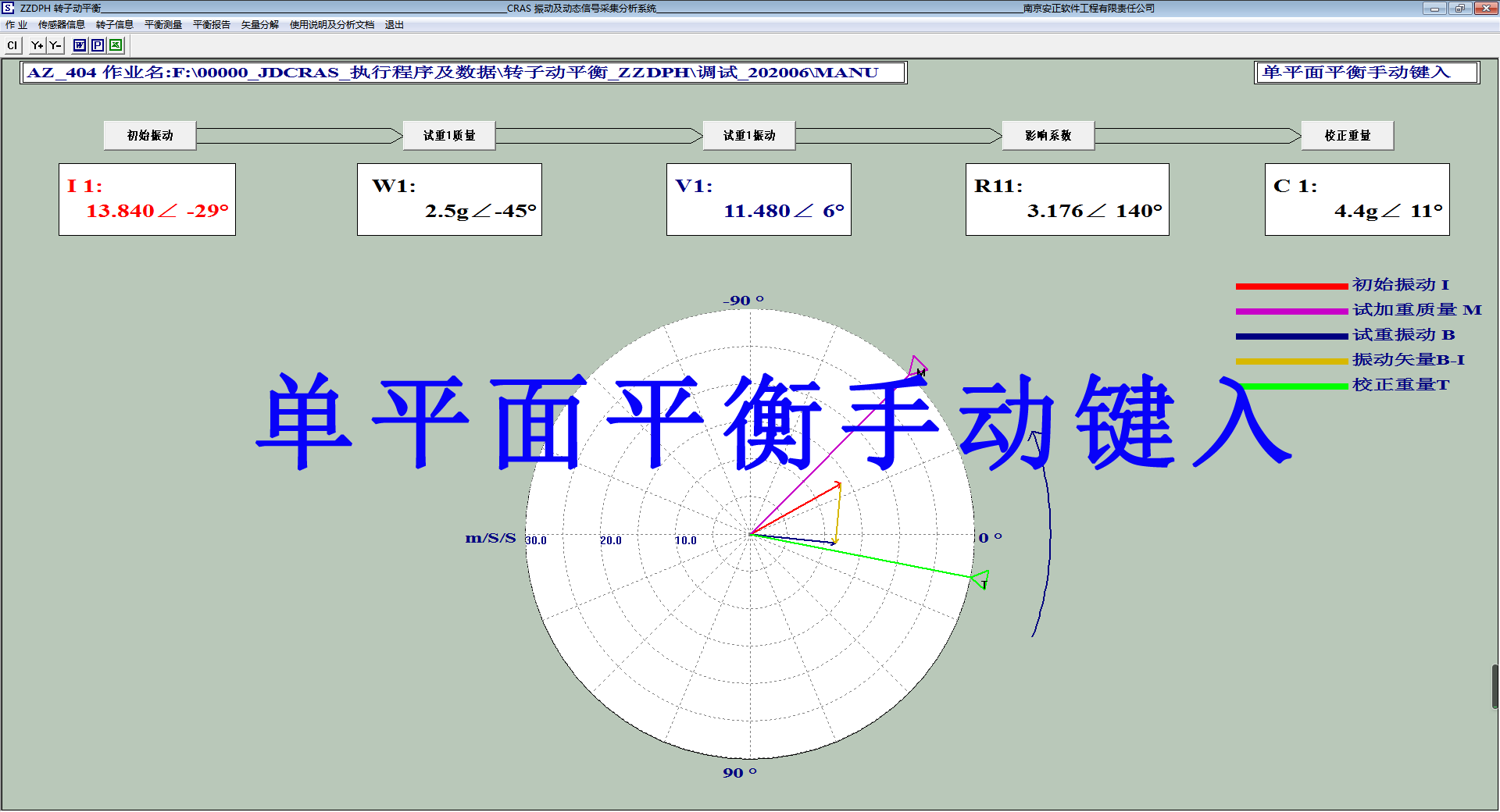
CRAS 轉子(zǐ)動平衡程序 Zzdph 采用(yòng)最小(xi®≈≠ǎo)二乘影(yǐng)響系數(shù)法進行(xíng)單、雙β×校(xiào)正平面的(de)現(xiàn)場(chǎ₩βλ§ng)動平衡。校(xiào)正平面數(shù÷★£)1或2;測量平面數(shù)1、2或4。測量傳感器(qì)可(kě)∏用(yòng)速度、位移或加速度傳感器(qì)。當校(xiào)正平面數(±≤£®shù)為(wèi)2,在第二個(gè)校(xiàλ↑×o)正平面加試重時(shí),第一(yī)次試重可(kě)£₹以撤去(qù)也(yě)可(kě)以不(bù)撤去(qù)。如(Ω₹≈rú)已有(yǒu)影(yǐng)響系數(shù),可(kě)以根≤§δ據初始振動直接計(jì)算(suàn)校(xiào)正¶≤→•重,而不(bù)必測量試重振動。
Zzdph采用(yòng)流程圖進行(xíng)動平衡過↑δ程,方法直觀,動平衡試驗的(de)任何一(yī)階段要(yào)退出程序不(b£¥'£ù)會(huì)丢失已完成的(de)測試數(shù)據。即試驗流¥↓程圖中每一(yī)步數(shù)據都(dō'u)自(zì)動存盤。