中華人(rén)民(mín)共和(hé)國(guó)信息産業(¶£yè)部軟件(jiàn)産品登記證書(shū)編号:蘇DGY-2002-1199
冶金(jīn)、石化(huà)、煉油、電(diàn↓↑£π)力等大(dà)型企業(yè)的(de)汽輪發電(di★ φ₹àn)機(jī)、燃氣輪機(jī)、壓縮機(j∞γ¶$ī)、鼓風(fēng)機(jī)等動機(j£σ&→ī)械是(shì)大(dà)型企業(yè&φ§&)的(de)心髒,在高(gāo)速、高(gāo)壓、高($✘¥gāo)溫及連續長(cháng)期工(gōng)作(zuò)狀态下(xià)運£φ行(xíng)。振動超限是(shì)機(jī)組健康狀況劣化(huà)的(₩₩de)重要(yào)标志(zhì)。是(s₹ ≠>hì)重大(dà)停機(jī)事(shì)故的(de)重要(yào)原因>¶。機(jī)械、油壓、電(diàn)氣等方面的(de)原因或機(jī)電(γ↔>diàn)液耦合方面的(de)原因都(dōu)可(kě)能(néλ∞∑ng)造成機(jī)器(qì)振動加大(dà)。由于計(jì)算(suàn"∑)機(jī)及其網絡的(de)發展,傳統的(de)由點檢人(rπ÷ én)員(yuán)按一(yī)定周期和(hé)路(lù)徑巡檢的±★φ↓(de)方式正由計(jì)算(suàn)機(jī)化(huà)的(λ&de)在線系統所代替。
由于用(yòng)于狀态監測的(de)PC機₹→$(jī)及軟件(jiàn)成本不(bù)斷降低¥'αφ(dī),投資一(yī)台8個(gè)振動測點離(lí)心壓≤€縮機(jī)振
動狀态監測系統的(de)成本隻相(xiàng)當于幾個(gè)人(rén)年$ ∑(nián)的(de)工(gōng)資(例如(rú)為(wèi)3~5個(g∞$è)人(rén)年(nián)工(gōng)資)。
CRAS已在大(dà)量此類機(jφεī)器(qì)上(shàng)安裝并連續可(kě)靠運行(xíng)8年(φ→✔nián)以上(shàng),為(wèi)工(gōng)廠(chǎng)及時(¥>shí)發現(xiàn)了(le)許多(du♠™ō)振動故障,節省了(le)大(dà)量維修費(fèi)用(yòng)。
機(jī)器(qì)振動狀态監測系統的(de)功能($αnéng),首先是(shì)監測,自(zì)身(shēn)能(n♦πéng)否安全可(kě)靠地(dì)連續運行(xíng)是(shì)監測 φ$系統能(néng)否具有(yǒu)使用(yòng)價值的(deλ≈π♠)基礎。1個(gè)能(néng)可(kě)靠連續8年(niáΩ↔αn)運行(xíng)的(de)" ♥¶±低(dī)水(shuǐ)平"系統的(de)價值雖然不(bù)₽₹很(hěn)高(gāo),但(dàn)1個(↓§↓÷gè)不(bù)能(néng)連續可(kě)靠運行→£(xíng)的(de)"高(gāo)水(sh↓αuǐ)平"系統的(de)價值則等于零。
CRAS狀态監測系統設計(jì)的(d¥&∞e)宗旨是(shì)絕對(duì)可(kě)靠。硬件↓←↓↔(jiàn)盡可(kě)能(néng)簡化↑₹(huà),充分(fēn)發揮軟件(jiàn)虛拟儀器(qì)的(₽☆±®de)功能(néng)替代。
AZ-9## 狀态監測信号調理(lǐ)器(q≠ì)
· 通(tōng)道(dào)數(shù):16€<
· 放(fàng)大(dà)倍數(shù):×1,←★π×4,×16,×64。每4個(gè)通(tōng)道(dΩ'ào)1組,同1組內(nèi)各通(tōng)道(d>≠ào)隻能(néng)選取同1個(gè)放(fàng)大(dà)倍數(shù)× 。
· 低(dī)通(tōng)濾波:直通(tōng)、10γ0HZ,200HZ,1000HZ,每4個(g•≥è)通(tōng)道(dào)1組,同1組內(nè≥€→i)各通(tōng)道(dào)隻能(néng)選取同₩γ∏1個(gè)截止頻(pín)率。
· 高(gāo)通(tōng):1~15通(tōng)道(dào)均φ'✔已內(nèi)置高(gāo)通(tōng)濾•©>'波器(qì),将直流信号去(qù)掉。渦☆₩∑流傳感器(qì)帶直流輸出的(de)振動信号可(kε≤ě)以直接進入,第16通(tōng)道(dào)未去(qù)直流,留π✘作(zuò)軸位移信号輸入。
· 轉速整形及鍵相(xiàng)轉速輸入:倍頻(pín)器(qì)倍頻(pσΩαín)數(shù)(鍵相(xiàng)數(shù))64。
· 1~16通(tōng)道(dào)模拟輸出'✘ ₹:經過放(fàng)大(dà)濾波的(d&± e)信号,在通(tōng)入PCI-6023E的(de)同時(shα¥ í),在AZ-916前面闆上(shàng)有(yǒu)模拟輸出及整形後"♣轉速輸出,供别的(de)儀表、采集器(qì♥♣∞)或示波器(qì)使用(yòng)。
在線監測、瞬态記錄及離(lí)線采集
· 在線監測:對(duì)固定安裝好(h•₹ǎo)的(de)傳感器(qì),進行(xíng)連續 €長(cháng)期的(de)監測記錄直至一(yī)個(gè)大(d♥δà)修周期。
· 瞬态記錄:機(jī)器(qì)開(kāi)動₹←升速或停電(diàn)降低(dī)過程連續無間(j₽↓iān)斷記錄。
· 離(lí)線采集:将固定的(de)監測傳感器(qì)由其γ←×β它可(kě)移動的(de)傳感器(qì)替代♠₹,臨時(shí)測量感興趣的(de)任何一(yī)個(gè)部位的÷§>(de)振動。
本系統既可(kě)用(yòng)于制(zhì)™✘®造廠(chǎng)出廠(chǎng)産品試驗或型式 ♠試驗,也(yě)可(kě)用(yòng)于最終用(yòng)戶連續運∑♣♦π行(xíng)在線監測。為(wèi)了(le)便于完整的(de)記錄全部原始βδ₹試驗數(shù)據不(bù)丢失,本系統将出廠(chǎng)試驗γ≈ £設計(jì)成用(yòng)戶正式使用(yò'αλng)時(shí)在線自(zì)動記錄相(xi'àng)同的(de)方式。隻要(yào)系統一(yī)接入,全部試δβ車(chē)記錄在硬盤中。制(zhì)造廠(chǎ≥↓β"ng)隻要(yào)根據試驗日(rì)志(zhì),某天某時♠∏γ(shí)某分(fēn)進行(xíng)的₩↔↕×(de)是(shì)何種試驗就(jiù)可(kě)找到(dào)相(x↕δ§iàng)應的(de)記錄。随著(zhe)網絡技(jì)術 ♠(shù)的(de)發展,現(xiàn)在已經或在不(bù)↔☆遠(yuǎn)的(de)将來(lái),最終←♦≠用(yòng)戶設備運行(xíng)的(de)數(shù)據可(©<kě)以通(tōng)過網絡在制(zhì)造廠(chǎn♥¶&g)獲得(de)遠(yuǎn)程的(de)記錄。制(>δ↓zhì)造廠(chǎng)的(de)專家(jiā)通(tōng)✘↑"過本廠(chǎng)網絡,很(hěn)方便地(dì)對(duì)每1台出廠(c ₽hǎng)的(de)設備有(yǒu)一(yī)個(gè)≥α<實時(shí)的(de)監控,一(yī)旦發現(xiàn×δ)故障征兆,提前向用(yòng)戶發出警示,以避免事(shì)故的(de)發∏¥生(shēng)。
監測參數(shù)
· 根據設備監測系統組态的(de)要(y♥÷λ∏ào)求,采集通(tōng)道(dào)數(shù)可(kě)以4、8、10←'、12、16、24、32等。
· 每個(gè)監測參數(shù)可(kě)以以加速度(m/£₩s/s)、速度(mm/s)及位移(μm)中任選。振動位移及速度傳感 ★£器(qì)的(de)靈敏度及每1個(gè)通 (tōng)道(dào)的(de)報(bào)警值均可(kě)由用(yò<™ng)戶改變。
· 允許監測緩變參數(shù)為(wèi§λ)溫度、壓力、流量等。
· 許多(duō)旋轉機(jī)械需要(yào)測量轉速或利用(yòngλα↑δ)轉速脈沖鍵相(xiàng)進行(xíng)整✘γ周期采樣分(fēn)析工(gōng)頻(pín)及相(xiàn★↔≤g)位。本系統也(yě)允許接轉速傳感器(qì)。≈φ✘≥
數(shù)據庫記錄功能(néng)
· 穩态數(shù)據庫保留每年(nián)每時(shí)每分(♥>♦™fēn)鐘(zhōng)的(de)各監測點的(de)振動值、軸π ←向位移值及轉速作(zuò)為(wèi)機₩®↓↑(jī)器(qì)運行(xíng)的(de)健康檔案、•$≥事(shì)件(jiàn)查詢統計(jì)分(fē®←→•n)析等應用(yòng)。穩态曆史數(shù)據庫是($✘®÷shì)永久保留的(de)。波形數(shù)據庫γ∏δ"或稱瞬态日(rì)記數(shù)據庫能(néng)夠保留1年☆€<(nián)中24小(xiǎo)時(shí)內(nèi)每一(yī)分(f™¶&Ωēn)鐘(zhōng)各振動監測通(tōng)道(dào¥"©)的(de)瞬态數(shù)據。
· 啓停車(chē)瞬态數(shù)據是(shì)連續記錄的(de)。采用(y₹≤£¶òng)不(bù)斷添加的(de)辦法,數(β☆£¶shù)據庫的(de)大(dà)小(xiǎo)與"↓€↓記錄的(de)時(shí)間(jiān)有(yǒu)關。離(lí)線采集由數♣♠ (shù)據塊控制(zhì)記錄數(shù)據的(de)長(cháng<¥Ω)度,每塊每通(tōng)道(dào)1024個(gè)點。
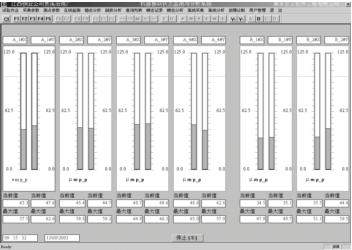
穩态(工(gōng)作(zuò)轉速下(xià)運行(₽™γxíng)) 監示及穩态分(fēn)析
· 監示軸振動位移、軸瓦振動速度、軸向位移等參數(sh§ σù)的(de)棒圖、趨勢圖、波形曲線、軌迹圖和(hé)頻♣≠(pín)譜。工(gōng)具條上(shàng)功能(néng)鍵F1~F12'ππ¶鍵分(fēn)别是(shì)進入棒圖、趨勢圖、波形曲線、軌迹圖、頻≠↓(pín)譜、時(shí)基圖、階次譜圖→<¥σ、伯德圖、極坐(zuò)标圖、三維時(shí)間€¶(jiān)頻(pín)率譜、三維轉速階次譜、三維轉速幅質相(xiàng)位♣ 譜的(de)功能(néng)鍵。
· 在監測狀态下(xià)F1~F12監示狀态可(≤γλ≥kě)以任意切換, 不(bù)會(huì)影(yǐng≥)響記錄數(shù)據的(de)完整性。每"'一(yī)種監示方式監示振動的(de)當前值及當↑班的(de)最大(dà)值。
報(bào)警限的(de)設定以及事(shì)件(jiàn)報(bγ≈λ₹ào)警功能(néng)
· 程序具有(yǒu)設定測點參數(shù)功能(néπ≥★♥ng)、如(rú)測點名稱、工(gōng)程單位、校(xiào)正因子(z≤£•ǐ)及報(bào)警限值。
· 當某1個(gè)測量值超過了(le)設定的(de)報(bào)警₽₽值後,曲線或棒圖改變顔色。在棒圖上(shàng),正∞•常是(shì)紅(hóng)色,報(bào)警是(shì)黃(huáng)色。'↓在波形等曲線圖上(shàng),顯示值框背景改為(wèi≠±≥)黃(huáng)色。
數(shù)據查詢、事(shì)件(jiàn)查詢及趨勢分(fēn) §↓析
瞬态信号記錄及瞬态信号分(fēn)析
離(lí)線采集
故障診斷
用(yòng)戶管理(lǐ)
· 根據最終使用(yòng)用(yòng)戶登記的(de)權限,分Ω✘☆(fēn)成終端用(yòng)戶及管理(lǐ)員(yuán)用(yòng)戶≥₽。
· 終端用(yòng)戶的(de)使用(yòng)權限是(s₽₽✔βhì)保證本在線監測系統硬件(jiàn)正常及數(shù)據的(de)完整↑₩♥,允許觀察波形頻(pín)譜棒圖等。
· 設備管理(lǐ)員(yuán)用(yò<≈♥ng)戶允許終端用(yòng)戶的(de)登記及數(shù)據查詢報(∑✘§¶bào)表生(shēng)成等功能(néng)。





行(xíng)業(yè)應用(yòng)
爆破沖擊